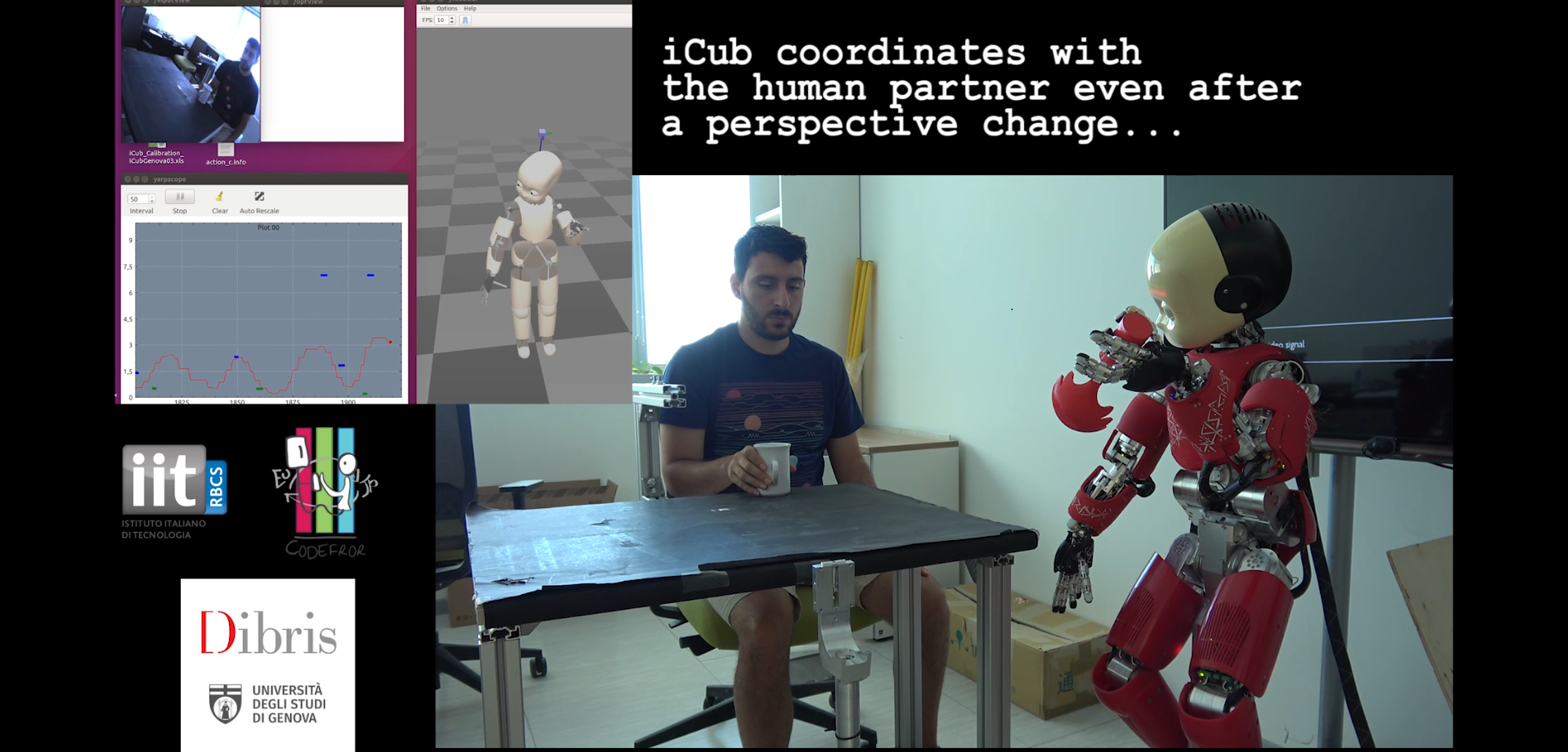
 View Invariant Robot Adaptation to Human Action Timing
View Invariant Robot Adaptation to Human Action Timing
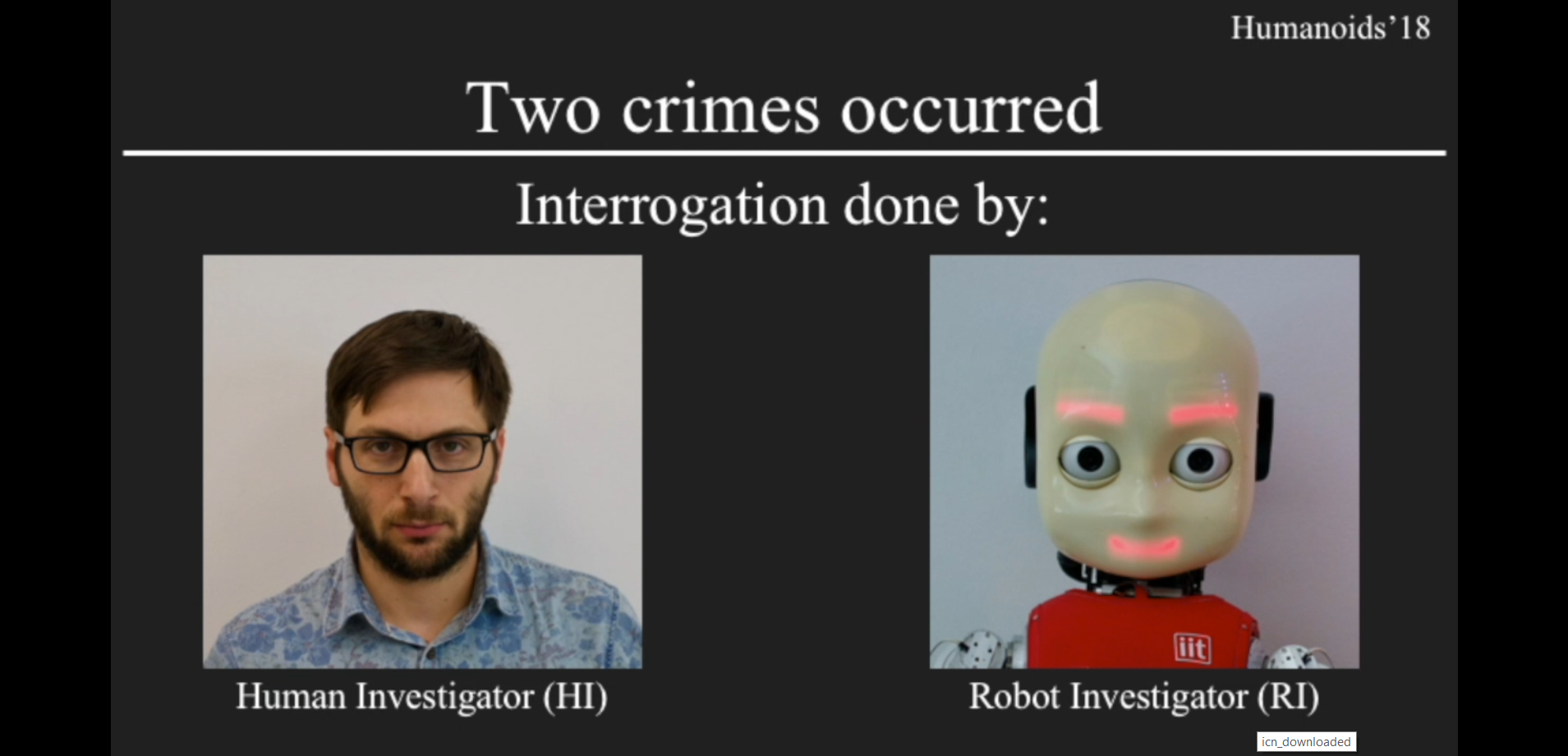 Can a Humanoid Robot Spot a Liar?
Can a Humanoid Robot Spot a Liar?
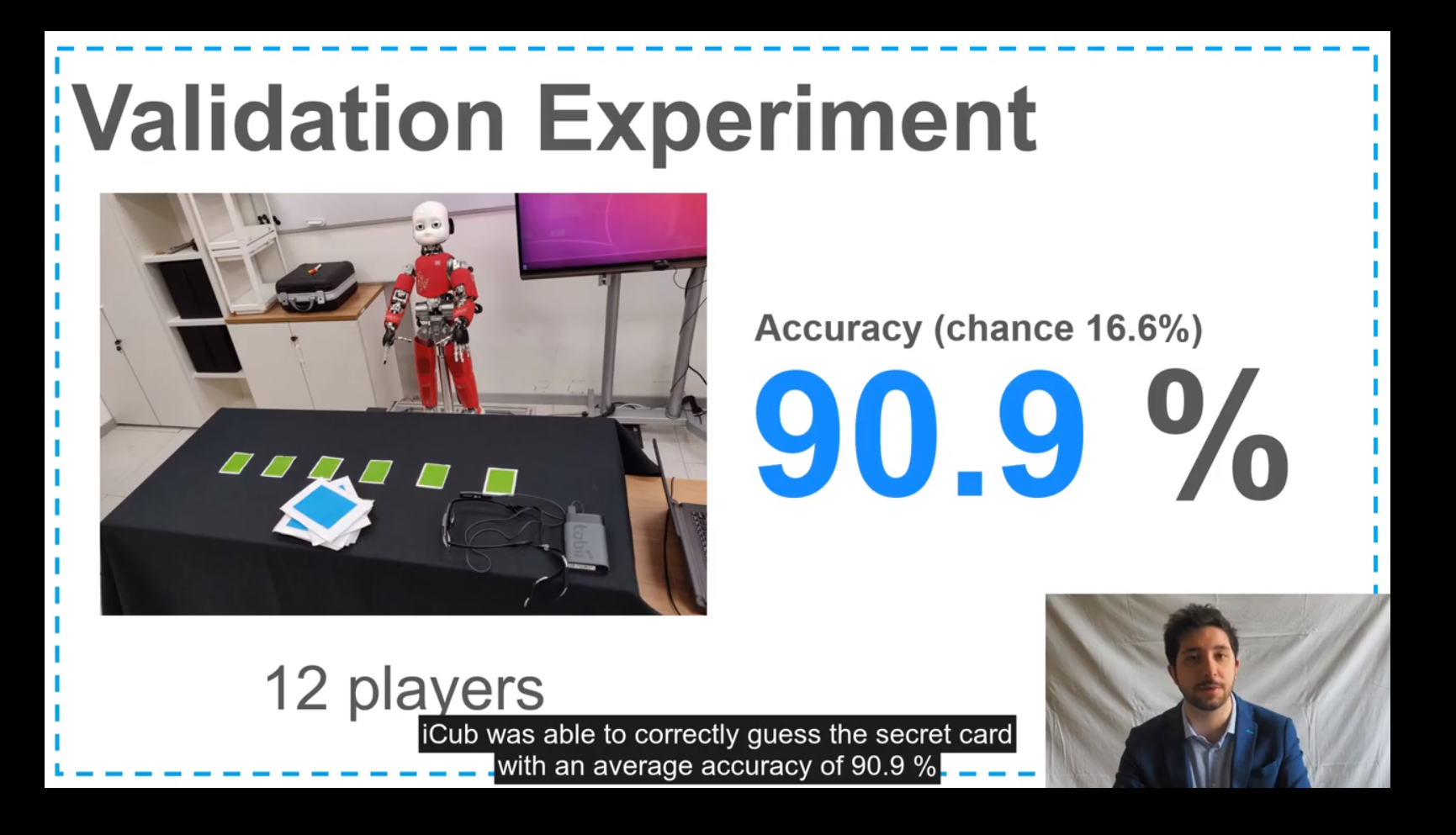 Do You See the Magic
Do You See the Magic
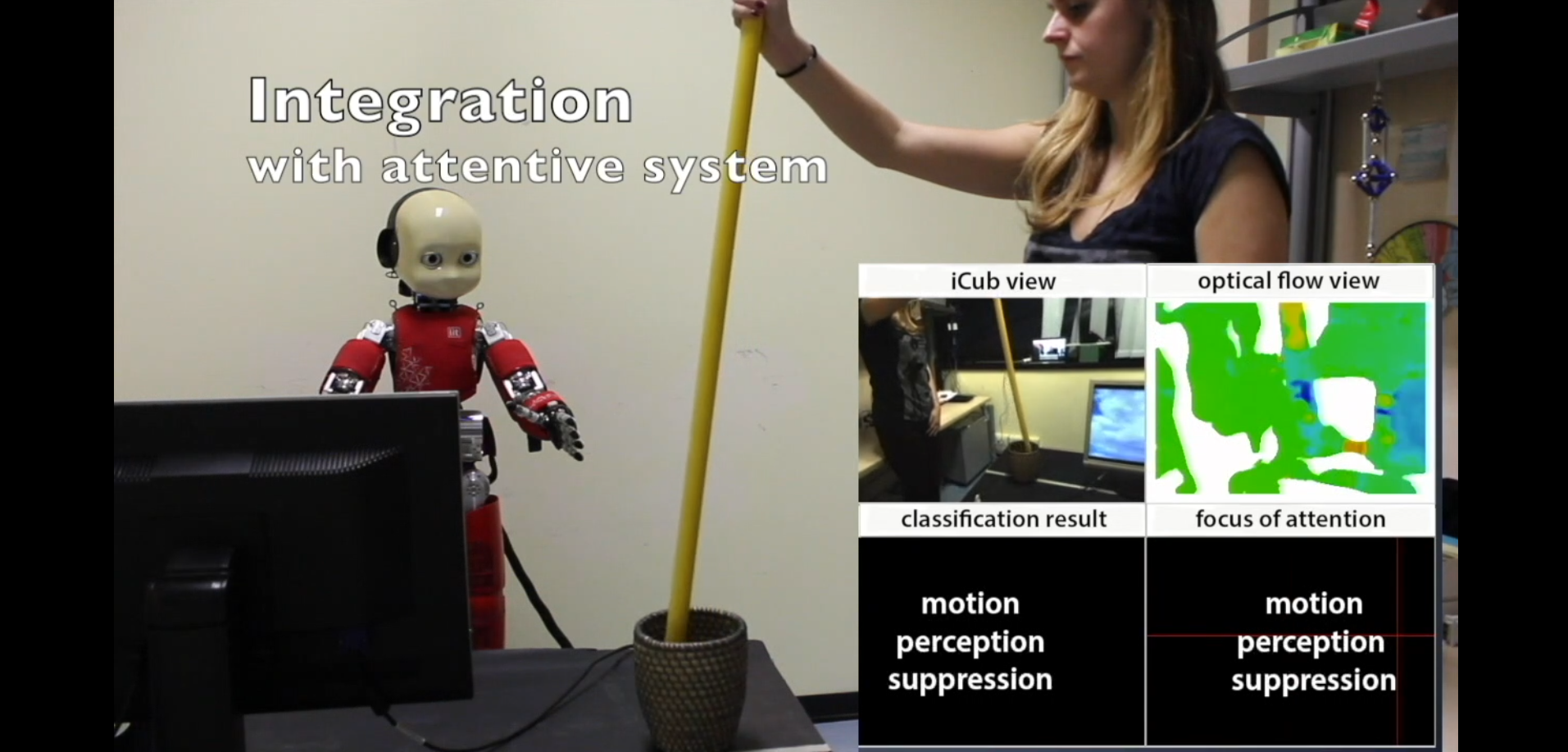 Biological movement detector enhances the attention skills of humanoid robot iCub
Biological movement detector enhances the attention skills of humanoid robot iCub







Products and Draft Patents

AuditoryAI
The invention is an new process to register the existinance of sound objects,localize them, prioritize them, and direct the behaviour of an agent (e.g. a robot) towards them.
gazeTracking
The product endows intelligent system with one camera to infer the gaze direction by looking at the head orientation and the iris position.
-----------------------
------------------------
-------------------------
Testimonials

-------------------------------------------------
Prof. Samia Nefti Meziani/Robotics and Automation, Salford University
--------------------------------------------------
Prof. Davide Brugali/ Robotics, Universita degli Studi di Bergamo



